Custom Robotics BLDC Motor Solutions for Advanced Automation Systems
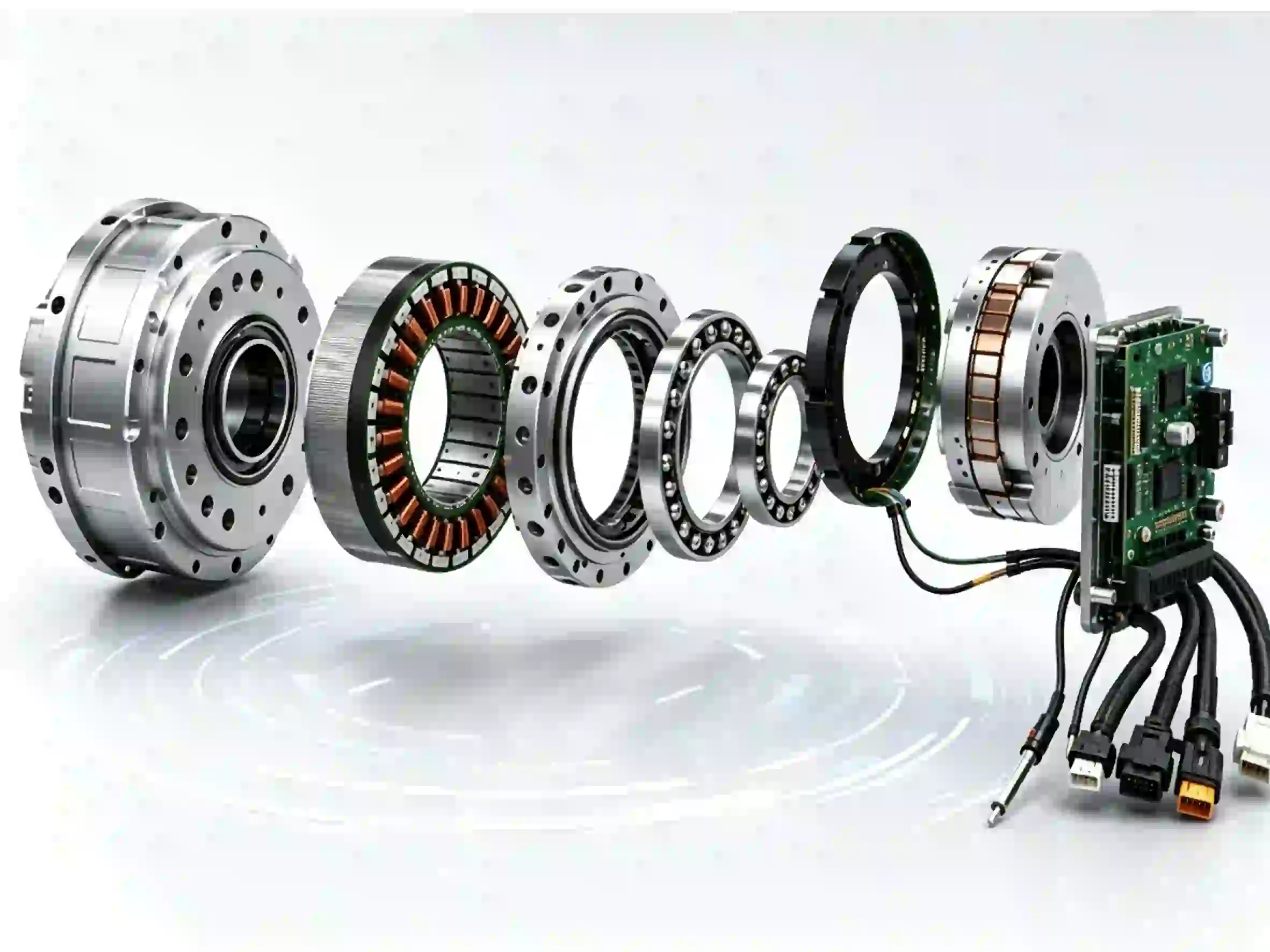
We develop high-performance Custom Robotics BLDC Motor solutions designed for next-generation automation and intelligent robotics systems. From concept design to prototype validation and low-volume production, we deliver precision motor systems that meet the strict requirements of modern robotics applications.
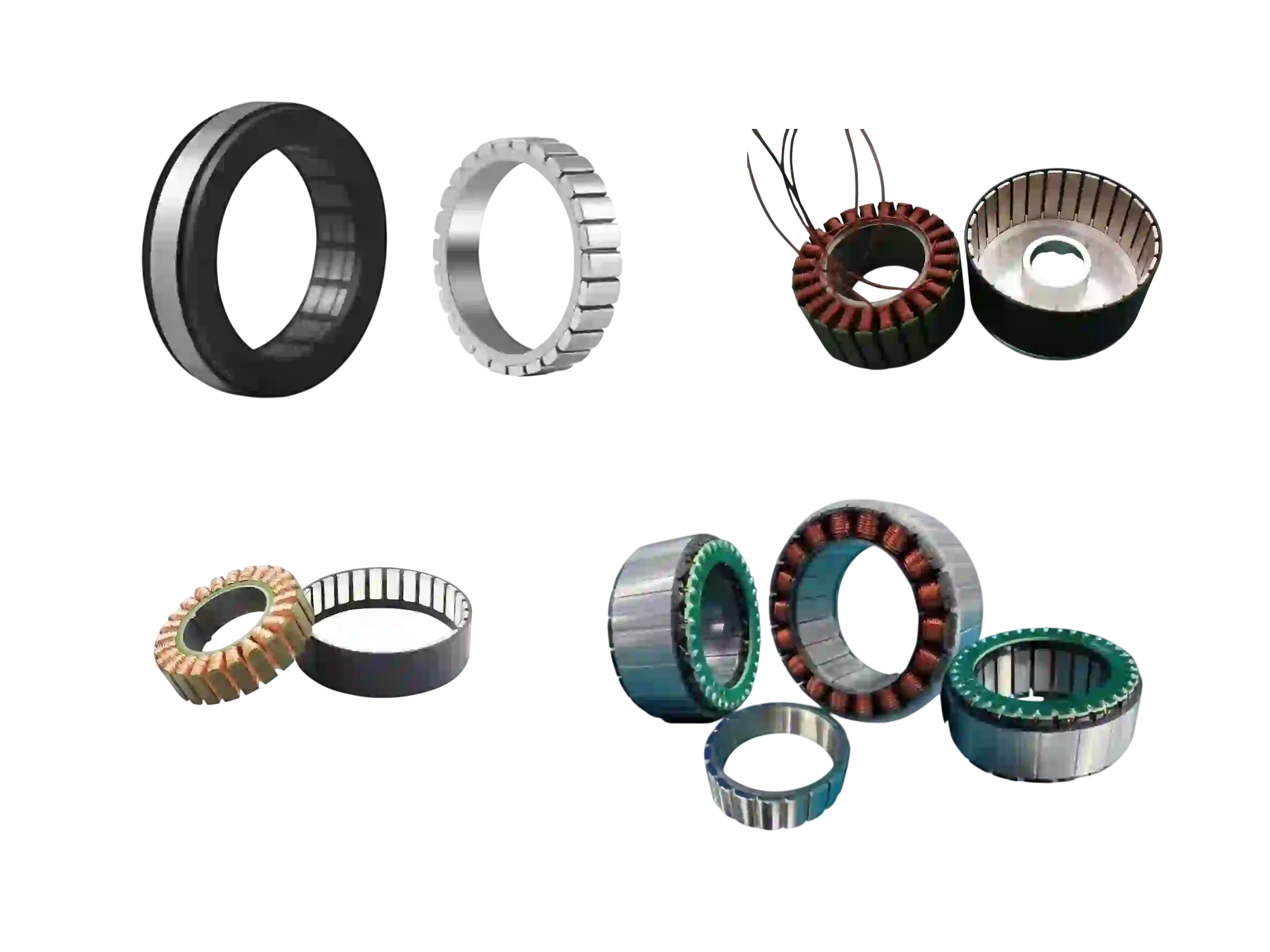
Each Robotics BLDC Motor is engineered for high torque density, ultra-low cogging, smooth motion control, and long-term operational stability. Our solutions are widely used in robotic arms, humanoid robots, AGVs, AMRs, exoskeletons, and other advanced automation platforms.
Key Challenges in Robotics BLDC Motor Systems
Insufficient Torque in Compact Robot Joints
Limited space in robotic joints often restricts torque output, reducing overall system performance. Our high-density motor designs deliver strong torque in compact structures.
Excessive Weight and Inertia
Heavy actuators reduce robot agility and increase energy consumption. We optimize motor structure to achieve higher power-to-weight ratio for mobile and collaborative robots.
Cogging Torque and Motion Ripple
Unstable torque output causes vibration and reduces positioning accuracy. Our Robotics BLDC Motor design minimizes cogging for smooth and precise motion control.
Thermal Issues in Continuous Operation
High-duty robotic applications generate heat that can degrade performance. Advanced thermal design ensures stable operation under continuous load.
Difficult System Integration
Standard motors often require complex mechanical adaptation. We support frameless and integrated motor designs for seamless robotic system integration.
High MOQ and Slow Development Cycles
Traditional suppliers limit prototyping flexibility. We support rapid customization and low-volume production for robotics development projects.
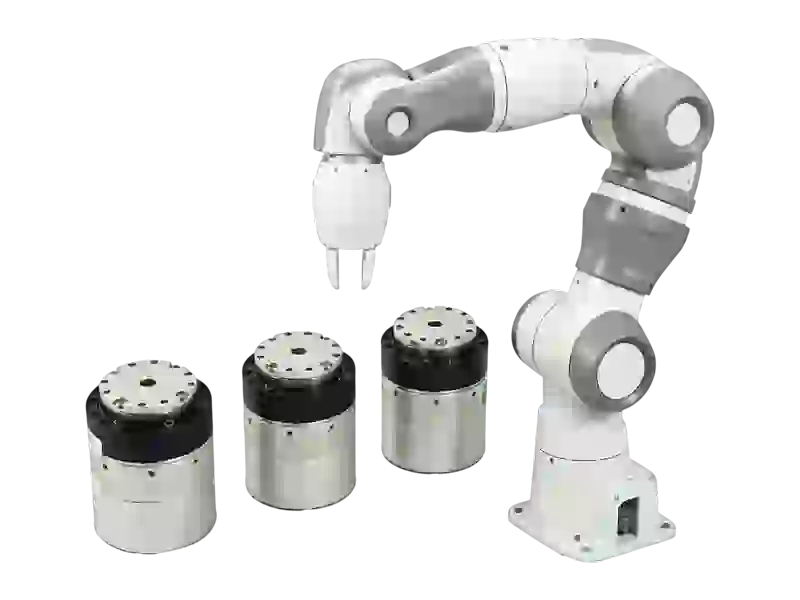
Applications of Custom Robotics BLDC Motor
Our motor systems are designed for a wide range of robotic and automation applications requiring precision, reliability, and high torque performance.
Industrial Robot Arms
Precision Robotics BLDC Motor solutions for robotic arms, welding systems, and pick-and-place automation.
- High positioning accuracy
- Low cogging torque
- Smooth motion control
- Stable long-term operation

Humanoid Robot Actuators
Compact high-torque motors for humanoid joint systems including arms, legs, and dexterous hands.
- High torque density
- Lightweight structure
- Fast response
- Smooth articulation

AGV & AMR Drive Systems
Efficient motor solutions for autonomous mobile robots and industrial logistics platforms.
- High efficiency drive
- Stable speed control
- Long runtime optimization
- Heavy-load capability

Quadruped & Biped Robots
High dynamic response motors designed for legged robotics and motion-intensive systems.
- Impact-resistant structure
- High instantaneous torque
- Dynamic motion stability
- Lightweight design
Other Robotics Applications
Our Custom Robotics BLDC Motor systems are also suitable for exoskeletons, surgical robots, underwater robots, unmanned vessels, and specialized automation equipment.
Custom voltage, torque, size, and integration options are available.
Frequently Asked Questions
What makes your Custom Robotics BLDC Motor suitable for robotics applications?
Our motors are designed for high torque density, low cogging, and precise motion control required in advanced robotics systems.
Do you offer frameless motor designs?
Yes, we provide frameless and integrated motor solutions for compact robotic joint applications.
How high is the torque density?
Up to 8–15 Nm/kg in production configurations — among the highest in class for robotics.
Are your motors suitable for exoskeleton motors?
Absolutely — lightweight, efficient, low thermal rise, and high torque at low speeds for wearable assist.
How fast can you deliver prototypes?
We typically deliver custom robotics motor prototypes within 11–28 working days depending on complexity.
Can your motors support humanoid robot joints?
Yes, our Robotics BLDC Motor systems are widely used in humanoid shoulder, elbow, knee, and hand actuators.