Custom Robotics Motors: High Torque Density & Precision for Next-Gen Robots
Engineer more compact, responsive, and powerful robotic joints. Our custom frameless BLDC motors and actuators deliver the absolute zero-cogging precision demanded by collaborative robots (cobots), humanoid platforms, and exoskeletons.
- Exceptional Torque Density: Up to 10–15 Nm/kg for high-payload, lightweight arms.
- Frameless & Hollow-Shaft: Large inner diameters for seamless cable routing and absolute encoder integration.
- Zero-Cogging Precision: Ultra-smooth motion control for delicate tasks and human-robot interaction.
- Agile Customization: Functional prototypes delivered in just 7–14 days.

Critical Challenges in Modern Robotics Drive Systems
Insufficient Torque in Compact Spaces
Conventional motors limit payload capacity and force output in small-diameter robot joints and exoskeletons.
Excessive Weight & Inertia
Heavy actuators increase overall robot mass, reduce agility, and raise energy consumption in mobile and collaborative robots.
Cogging Torque & Ripple Effects
Noticeable torque pulsations cause jerky motion, reduced positioning accuracy, and vibration in precision tasks.
Thermal Build-Up During Continuous Operation
High-duty-cycle applications (e.g., exoskeleton motors) lead to thermal derating, shortened lifespan, or safety shutdowns.
Backlash & Mechanical Compliance Issues
Geared solutions introduce play and hysteresis, compromising repeatability in surgical robots and cobots.
Integration Complexity in Frameless Designs
Difficulty achieving direct-drive performance without custom engineering delays development.
Long Lead Times for Specialized Actuators
Off-the-shelf robot joint actuators rarely match exact torque, speed, and mounting requirements.
Standout Engineering Advantages of Our Robotics Motors
Purpose-built features maximize torque, minimize size and weight, and ensure ultra-precise, smooth motion — making your robots faster, stronger, lighter, and more reliable.

High Torque Density Motors
Up to 10–15 Nm/kg — deliver exceptional force in small volumes for payload-critical applications.
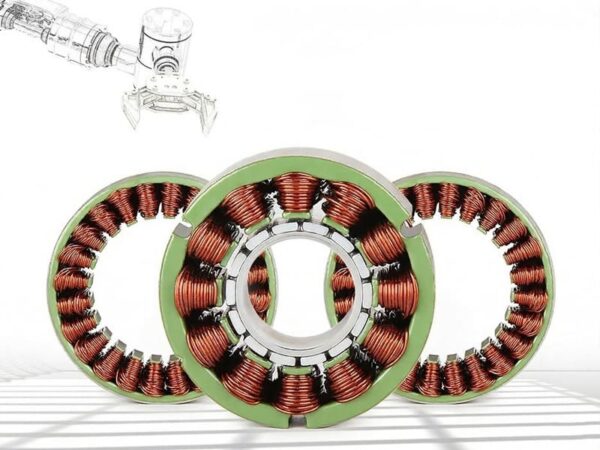
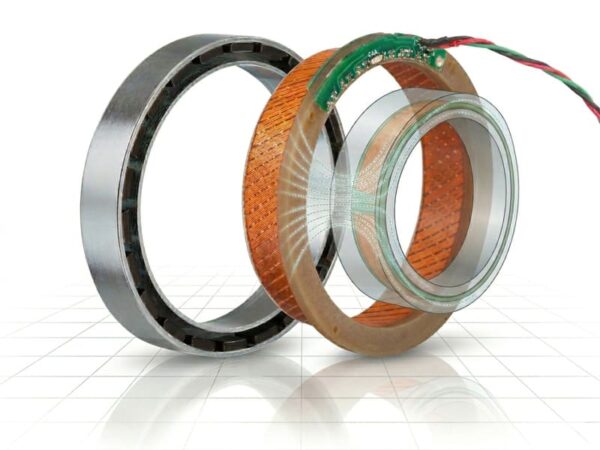
Frameless Torque Motors
Large inner diameter, direct-drive integration, zero backlash, and ultra-low profile for compact robot joints.

Robot Joint Actuators Ready
Integrated or standalone designs with hollow shaft for cable routing and high-precision encoders.

Lightweight Construction
Lightweight construction, high efficiency, and low thermal signature for wearable and assistive devices.
Zero-Cogging & Minimal Ripple
High power-to-weight ratio keeps overall robot mass low for better agility and energy efficiency.
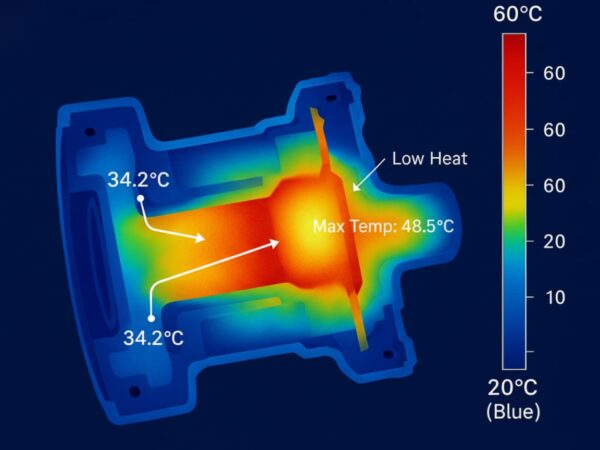
Peak Efficiency & Low Heat
>94% peak efficiency with advanced windings and materials minimizes thermal rise during long cycles.
Representative Specifications for Robotics BLDC Motors
| Specs Name | Specs Value |
|---|---|
| Voltage | 24V–60V DC (48V most common) |
| Outer Diameter | 60–180 mm (frameless) |
| Stack Length | 10–60 mm |
| Peak Torque | 1–35 Nm |
| Continuous Torque | 0.5–18 Nm |
| Rated Speed | 1,000–6,000 RPM |
| Efficiency | 92–96% |
| Cogging Torque | <1% of rated torque |
| Hollow Shaft Diameter | 20–100 mm |
| Customization Lead Time | 7–14 days for prototypes |
Common Questions About Robotics BLDC Motors
What makes your motors ideal for robotics BLDC applications?
Extreme torque density, zero-cogging smoothness, and frameless options enable compact, high-performance joints.
Do you offer true frameless torque motors?
Yes — large hollow shaft, direct-drive capable, minimal axial length for integrated robot designs.
How high is the torque density?
Up to 10–15 Nm/kg in production configurations — among the highest in class for robotics.
Are your motors suitable for exoskeleton motors?
Absolutely — lightweight, efficient, low thermal rise, and high torque at low speeds for wearable assist.
Can you support sensorless or high-resolution feedback?
Yes — sensorless FOC or high-count encoders/resolvers for sub-degree precision.
What communication protocols are supported?
CANopen, EtherCAT, PWM, RS485 — common in industrial and collaborative robotics.
How fast can you prototype a custom robot joint actuator?
Functional samples typically in 7–14 days after spec freeze.
Do you provide thermal and dynamic simulation data?
Yes — detailed thermal models, torque ripple analysis, and lifetime estimates included.